 |

Submitted by , posted on 22 May 2002
|
 |
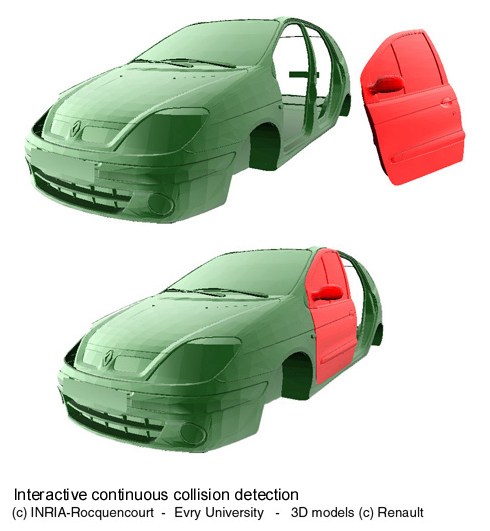
Image Description, by

This image is a snapshot of the interactive rigid body simulator I've developped during my PhD.
The collision detection algorithms used in the simulator are continuous : as opposed to most discrete collision detection methods, which detect objects interpenetrations, the present method uses an arbitrary in-between rigid motion to interpolate the initial and final object's positions and compute the time of first contact. Consequently, no interpenetration ever occurs, and no collision can be missed.
Regarding the dynamics algorithms, the traditional LCP (linear complementarity problem) approach has been replaced by the use of Gauss' least constraints principle, which is mathematically equivalent to the LCP approach, but presents some computational advantages.
In the example above, the car door (16000 triangles) is precisely (ie without any interpenetration) and interactively positioned in the car skeleton (29000 triangles).
Related papers and movies can be found at http://www-rocq.inria.fr/~redon
|
|