 |

Submitted by , posted on 03 October 2003
|
 |
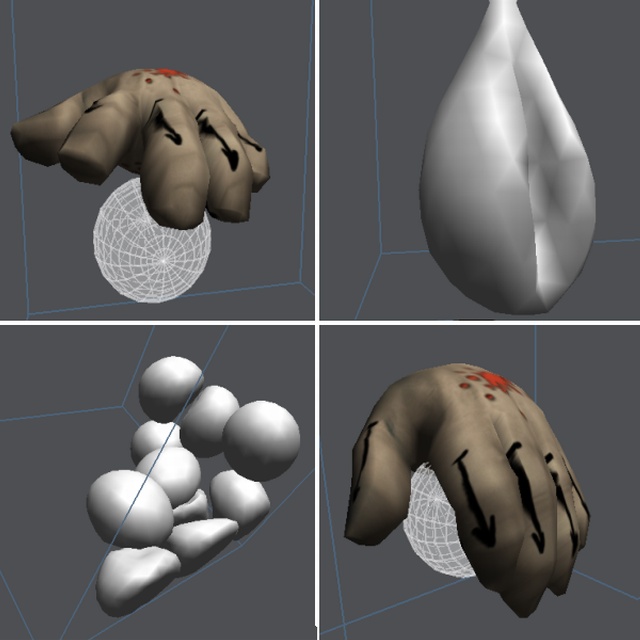
Image Description, by

Picture which I submitted to IOTD gallery contains screen shots of my Soft
Body
Simulator, from the newest version - 2.0 of it. Method which I developed
for Soft
Bodies Behavior simulation is rather new and original. I mean that I did
not find any
similar research work about Soft Bodies.
I work with pressure model of Soft Body. For example a ball with an air
inside of it is
an example of pressure based soft body. What I really had to do in that
simulation was to
calculate a pressure for my body, then distribute it into all finite
elements of the body.
For pressure calculation I used Clausius-Clapeyron equation, which is
known from fundamental
thermodynamics physics.
There were some problems during developming of that simulation. Two of
them are most
important and that are:
- volume of the body calculation
- body - body collision detection & response
For both of them I used simplification. I approximated the soft body by an
bounding
rotated ellipsoid. It gave me possibility to calculate a volume with a
quite resonable
accuracy. I also used them to make collisions of the bodies. Collisions
work very well for
"ball" type of objects only. But volume calculation is quite good for all
objects.
Soft Body Simulator 1.0 - a previous version of that software took 2nd
place on Programming
Contest on Physics Educational Software on my home University of Wroclaw
(Poland). Working
application of Soft Body (both 1.0 and 2.0 versions) for Windows operating
system you can
download on my web page.
Graphics and 3d model of the hand presented here are created by
inz. Marcin Jarosz especially for Soft Body 2 project. Thank you.
Maciej Matyka
http://panoramix.ift.uni.wroc.pl/~maq
|
|