 |

Submitted by , posted on 01 September 2001
|
 |
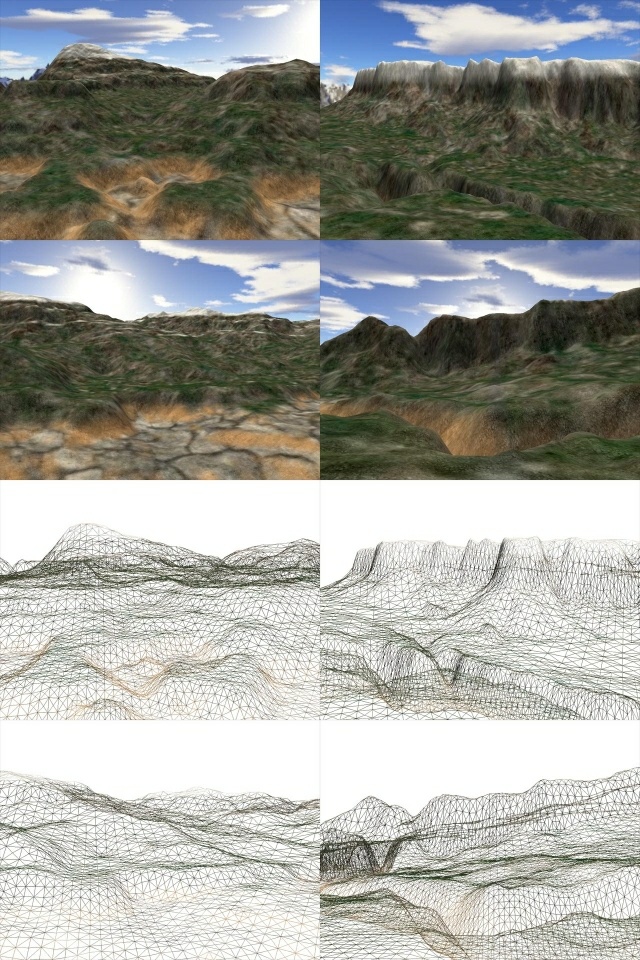
Image Description, by

Shown in the screen shots is the implementation of my terrain CLOD algorithm at
work.
Features of the algorithm include:
quadtree based VFC.
frame coherent view-dependent CLOD meshing.
geomorphing.
LOD accuracy adjustment, my version of the "cluster ROAM bintree",4x subdivide
in the implementation.
low mem consumption, 1-4 bytes per height sample, further 4/16/64 cut by LOD
accuracy adjustment.
and a lot more.
Features of the implementation include:
optimized for TNT2 class hardware, as I developed it on a PIII 500+TNT2 pro.
(yeah I know about the debate of CLOD on T&L hardware, but it's really possible
to get fast CLOD implementation on T&L hardware, see the ROAM discussions in the
gdalgorithm list).
2M tps on TNT2 agp2x+PIII500 @40-50 fps. 4M tps on my laptop GeForce2 GO! agp4x
+ mobile PIII 1G @ 60fps.
SSE optimized geomorphing code.
the usual "landscape stuff":sky box/texture systemization,etc.
A demo is available at www.tbns.net/davidz. Note that the sky-box texture
quality is quite bad because of JPEG compression, and the size of the landscape
is 1025*1025. A NVIDIA TNT card or better is recommended. I once noticed texture
seams artifacts on a ATI Rage 128, so please avoid ATI cards.(sorry, never got
the time to fix it). Ah. And the thing is done in OpenGL, really nice for
prototyping.
Happy coding.
Zhu Yuanchen
|
|