 |

Submitted by , posted on 24 June 2002
|
 |
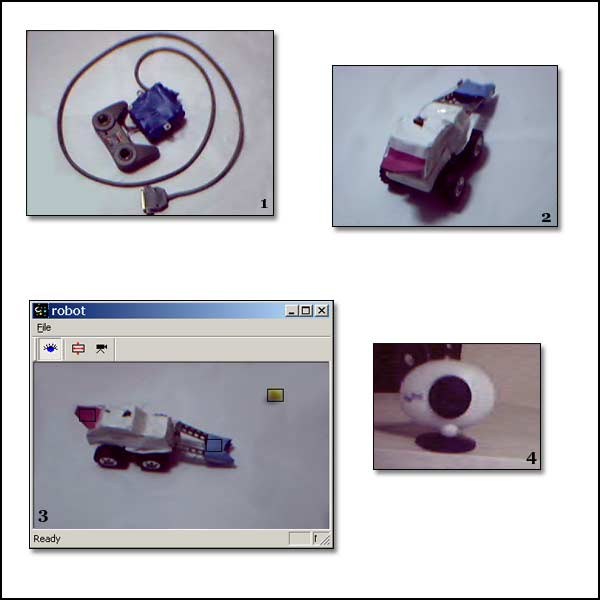
Image Description, by

The image above shows some pictures of my high-school robotics project.
A team of three, we were given complete freedom in designing and
building our final project.
Although most of the students in our class had decided to stick to the
popular concept of a robot, we chose to design a rather unconventional
robot: Instead of having one robot-unit, consisting of a censor,
processing unit and vehicle - we decided to disunite our system to
several independent modules and components.
The first component is the processing unit. We used a standard personal
computer for this, while our only alternative was a simple processing
unit, based on a semi-assembly language. Using the simple processing
unit meant no means of debugging, no high-level programming language
and, most importantly, a tight limit on RAM memory. Obviously, using a
personal computer was a wise decision - We used C++ as the programming
language and MSVC as our IDE and debugging environment.
We had two hardware modules in our project. The first is a toy car
(Figure 2) with a remote control (Figure 1), which served as our
vehicle-component. Since our main project goal was developing the
algorithm itself, we decided to avoid mechanical work as much as
possible. Accordingly, we didn't construct the car ourselves, but
purchased a toy car. We disassembled the electronic part of the remote
control, and connected it through electrical relays to a parallel-port
cable. We then used the WinIO driver to access the parallel port, and
control the car's actions. After a lot of work on this component, we had
a fully extendable and usable library, which controlled the car's
movement and rotation.
The second hardware module is our censer-component, which is actually a
cheap webcam (Intel EasyPC Camera, Figure 4). Again, we had to write
some code in order to get access to the streaming picture from the
camera. We attempted using libraries such as MS WIA and Twain, but ended
up using Intel's free OpenCV library.
We now had input data (the pictures taken by the camera) and output
methods (the car controller). The processing itself consisted of two
algorithms: one is an object recognition algorithm, which detected
objects in the input picture and returned their coordinates. Note that
the coordinates were 2D coordinates, affected by the camera's
perspective. Therefore, we transformed the coordinated into top-view
coordinates. The second algorithm is an object navigation algorithm that
decided how to move the car according to the object-coordinates
calculated by the other algorithm.
The final result:
A ball and the car are initially placed in random locations on a flat
surface. Then, the camera is set so that the car and the ball are inside
the camera's picture. Our program, a Win32 application (Figure 3), is
started and the robot begins. The car automatically finds the ball,
approaches it, rotates with it until it points at one of the corners and
pushes the ball to the corner.
If you are interested in more information concerning the implementation
of the robot, please contact me by mail at: elikez@gmx.net.
The team: Elik Eizenberg, Michael Seldin, Sasha Kravtsov
|
|